Caterham R400 Superlight
Verfasst: So Feb 14, 2016 4:58 pm
Hallo zusammen,
nachdem sich mein Megasquirt Projekt dem Ende neigt und alles perfekt zu funktionieren scheint, wage ich langsam es vorzuzeigen
Es handelt sich um einen Caterham R400 Superlight mit 1,8l Rover K Series Motor. Paar Worte zum Auto und Motor, da es sich ja schon um nen ziemlichen Exoten handelt. Caterham dürfte klar sein: Leichtbau, kein überflüssiger Schnickschnack. Mein R400 hat das komplette Carbon Paket und netten Kleinkram, so kommt er auf 490kg. Bei serienmäßig 200PS ergibt das ein Leistungsgewicht von 400PS/t --> R400.



https://www.youtube.com/watch?v=AargcPVtL9U
Der Motor ist ein tolles Stück Technik und kann in den ursprünglichen Rover- und Land Rover Kackfässern sein eigentliches Potenzial gar nicht richtig zeigen: Extrem leicht (<100kg trocken) durch long bolt Design mit schwimmenden Zylinderlaufbuchsen und sehr drehzahlfest. Original gibt es ihn mit 120PS bzw. max. 160PS als VVC mit variabler Ventilsteuerung (nicht Phasenverstellung, sondern Hub!!!). Und das Mitte der 90er!
Mein Motor basiert auf dem Rennsport-Ableger "VHPD" (Very High Performance Derivative) mit 190PS. Durch einige Caterham Gimmicks (Walzenschieber, Abgasanlage, MBE Motorsteuerung) steigt die Leistung auf die 200PS@ca.8000 1/min und etwa 200Nm.
Als Motorenentwickler komme ich irgendwie nicht mit dem Gedanken klar, einen Motor nicht zu zerlegen. Deshalb habe ich letzten Winter "etwas" Hand angelegt. Was eigentlich nur als "Bisschen Kopfbearbeitung" geplant war, hat sich - wie so oft - völlig verselbstständigt. Und gelandet bin ich ziemlich am Limit dessen, was auf der Straße noch fahrbar ist: Kopf maximal bearbeitet, größere Ventile einlass- und auslassseitig, Endstufe-Nockenwellen (12,2mm Hub), verstellbare NW-Räder, starrer Ventiltrieb mit doppelten Federn, H-Schaft Pleuel, feingewuchteter Kurbeltrieb und andere Nettigkeiten. Angepeiltes Ziel (Prüfstand folgt im Frühjahr) sind 220-230PS, die Maximaldrehzahl liegt bei 8.500 1/min. So bin ich völlig problemlos die letzte Saison unterwegs gewesen.








Aber nun zurück zum eigentlichen Thema: MEGASQUIRT! Warum eigentlich, wo doch schon eine freiprogrammierbare ECU verbaut war? Ganz einfach, die MBE ist extrem robust, aber halt schon in die Jahre gekommen. Ich wollte gerne folgende Features haben:
- Breitband Lambda-Unterstützung
- Vollsequentielle Einspritzung und Zündung mit COPs statt Gruppeneinspritzung
- Alpha-n / p-n Hybrid (ITB Mode)
- EAE Beschleunigungsanreicherung
- Table Switch
usw.
Ich hab mich wieder für eine maximal aufgerüstete (4 Einspritz- und Zündtreiber) UMC1 von Peter entschieden.

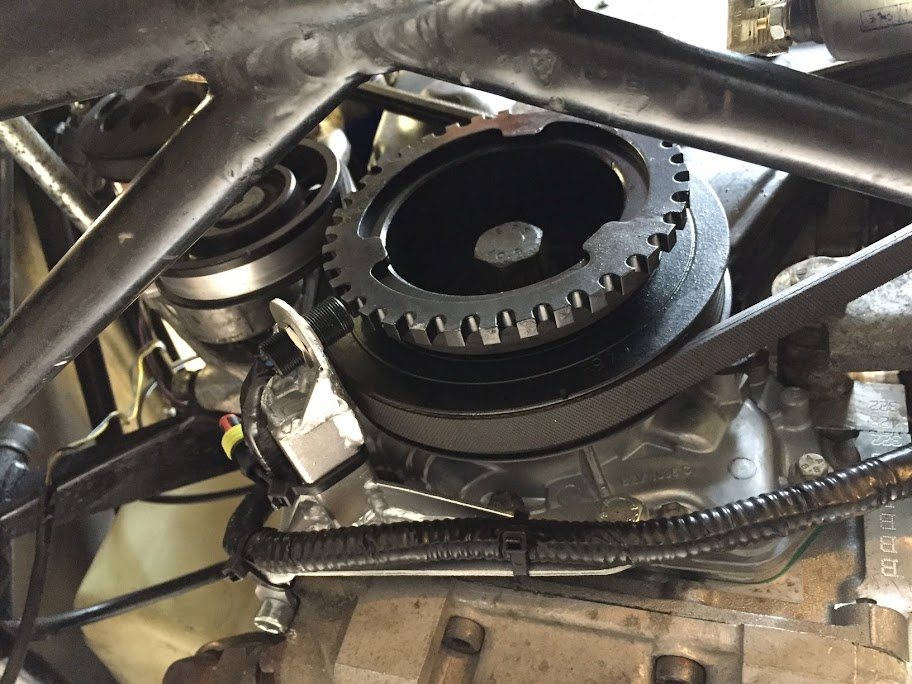
Nach langer Excel-Arbeit, um die MBE Kennfelder in die MS zu überführen, konnte ich den ersten Startversuch wagen. Nach gaaaanz viel Orgeln lief die Karre dann auch recht passabel. Deshalb bin ich das Thema „Vollsequentiell“ angegangen. Und musste gleich lernen, dass der Rover Wheel Decoder (36-1-1-1-1 Rad) keinen NW-Sensor unterstützt, grrrr. Also flink ein 36-1 Rad für den Schwingungsdämpfer und einen Sensor für die Nockenwelle gebrutzelt. Beide laufen über Hallsensoren (kompakter Renault Sensor an der NW und Cherry GS100701 an der KW).

Was soll ich sagen? Damit springt der Motor nicht nur sofort an (keine Sync Losses mehr), er läuft auch traumhaft ruhig --> Voller Erfolg bis hierhin.
Beweis: https://www.youtube.com/watch?v=Ct_cAAIGLh8
Nächster und schon begonnener Schritt ist dann das Fertigbauen des Kabelbaums. Und dann geht’s im Frühjahr ans Abstimmen *freu*
To be continued…
Gruß
Dominik
nachdem sich mein Megasquirt Projekt dem Ende neigt und alles perfekt zu funktionieren scheint, wage ich langsam es vorzuzeigen
Es handelt sich um einen Caterham R400 Superlight mit 1,8l Rover K Series Motor. Paar Worte zum Auto und Motor, da es sich ja schon um nen ziemlichen Exoten handelt. Caterham dürfte klar sein: Leichtbau, kein überflüssiger Schnickschnack. Mein R400 hat das komplette Carbon Paket und netten Kleinkram, so kommt er auf 490kg. Bei serienmäßig 200PS ergibt das ein Leistungsgewicht von 400PS/t --> R400.
https://www.youtube.com/watch?v=AargcPVtL9U
Der Motor ist ein tolles Stück Technik und kann in den ursprünglichen Rover- und Land Rover Kackfässern sein eigentliches Potenzial gar nicht richtig zeigen: Extrem leicht (<100kg trocken) durch long bolt Design mit schwimmenden Zylinderlaufbuchsen und sehr drehzahlfest. Original gibt es ihn mit 120PS bzw. max. 160PS als VVC mit variabler Ventilsteuerung (nicht Phasenverstellung, sondern Hub!!!). Und das Mitte der 90er!
Mein Motor basiert auf dem Rennsport-Ableger "VHPD" (Very High Performance Derivative) mit 190PS. Durch einige Caterham Gimmicks (Walzenschieber, Abgasanlage, MBE Motorsteuerung) steigt die Leistung auf die 200PS@ca.8000 1/min und etwa 200Nm.
Als Motorenentwickler komme ich irgendwie nicht mit dem Gedanken klar, einen Motor nicht zu zerlegen. Deshalb habe ich letzten Winter "etwas" Hand angelegt. Was eigentlich nur als "Bisschen Kopfbearbeitung" geplant war, hat sich - wie so oft - völlig verselbstständigt. Und gelandet bin ich ziemlich am Limit dessen, was auf der Straße noch fahrbar ist: Kopf maximal bearbeitet, größere Ventile einlass- und auslassseitig, Endstufe-Nockenwellen (12,2mm Hub), verstellbare NW-Räder, starrer Ventiltrieb mit doppelten Federn, H-Schaft Pleuel, feingewuchteter Kurbeltrieb und andere Nettigkeiten. Angepeiltes Ziel (Prüfstand folgt im Frühjahr) sind 220-230PS, die Maximaldrehzahl liegt bei 8.500 1/min. So bin ich völlig problemlos die letzte Saison unterwegs gewesen.
Aber nun zurück zum eigentlichen Thema: MEGASQUIRT! Warum eigentlich, wo doch schon eine freiprogrammierbare ECU verbaut war? Ganz einfach, die MBE ist extrem robust, aber halt schon in die Jahre gekommen. Ich wollte gerne folgende Features haben:
- Breitband Lambda-Unterstützung
- Vollsequentielle Einspritzung und Zündung mit COPs statt Gruppeneinspritzung
- Alpha-n / p-n Hybrid (ITB Mode)
- EAE Beschleunigungsanreicherung
- Table Switch
usw.
Ich hab mich wieder für eine maximal aufgerüstete (4 Einspritz- und Zündtreiber) UMC1 von Peter entschieden.
Nach langer Excel-Arbeit, um die MBE Kennfelder in die MS zu überführen, konnte ich den ersten Startversuch wagen. Nach gaaaanz viel Orgeln lief die Karre dann auch recht passabel. Deshalb bin ich das Thema „Vollsequentiell“ angegangen. Und musste gleich lernen, dass der Rover Wheel Decoder (36-1-1-1-1 Rad) keinen NW-Sensor unterstützt, grrrr. Also flink ein 36-1 Rad für den Schwingungsdämpfer und einen Sensor für die Nockenwelle gebrutzelt. Beide laufen über Hallsensoren (kompakter Renault Sensor an der NW und Cherry GS100701 an der KW).
Was soll ich sagen? Damit springt der Motor nicht nur sofort an (keine Sync Losses mehr), er läuft auch traumhaft ruhig --> Voller Erfolg bis hierhin.
Beweis: https://www.youtube.com/watch?v=Ct_cAAIGLh8
Nächster und schon begonnener Schritt ist dann das Fertigbauen des Kabelbaums. Und dann geht’s im Frühjahr ans Abstimmen *freu*
To be continued…
Gruß
Dominik